지난 글에서 GAN의 기본 원리와 배경 이론에 대해 살펴보았다면, 이번 글에서는 GAN에 대한 기본적인 이해를 바탕으로 GAN의 특징과 장단점에 대해 조금 더 심화된 내용을 다루고자 한다.
DCGAN
초창기 GAN에 대해 얘기하려고 하면 빼놓을 수 없는 연구가 바로 DCGAN이다. GAN이 지금은 매우 뛰어난 결과들을 보여주고 있지만, 초기 결과는 아이디어의 참신성에 비해 그리 인상적이지 않았다. GAN 구조가 학습시키기 매우 어려웠다는 것도 여러 이유 중 하나였는데 Deep Convolutional GAN (DCGAN)이 나온 이후, GAN으로 만드는 결과들이 매우 급격하게 발전하기 시작했다. 크게 이 논문이 기여한 바를 정리해보면,
- 대부분의 상황에서 언제나 안정적으로 학습이 되는 구조를 제안하였다는 점
- 마치 word2vec과 같이 DCGAN으로 학습된 생성기가 벡터 산술 연산이 가능한 성질을 갖고 이것으로 의미론적(semantic)으로 신규 샘플을 생성할 수 있다는 것을 보여주었다는 점
등이 있겠다.
DCGAN 논문은 GAN이 잘 학습되는 구조를 매우 세세한 가이드라인으로 제시한 연구이다. 이 논문 이후에 나온 대부분의 GAN 연구들은 어떤 형태로든 DCGAN 구조를 바탕으로 하고 있다고 할 정도로 매우 잘 확립된 구조이다. 일단 DCGAN에서 제시한 가이드 라인대로 GAN 구조를 짜면 상당히 안정적으로 학습이 된다. 이런 구조를 발견하기 위해서 얼마나 대학원생들이 힘들었을지 논문의 한 구절에서 언뜻 느껴볼 수 있다.
“However, after extensive model exploration, we identified a family of architectures that resulted in stable training across a range of datasets and allowed for higher resolution and deeper generative models.”
DCGAN은 이름에서 알 수 있듯이 convolution 구조를 GAN에 잘 결합한 것이다. Convolutional neural network (CNN)이 지도학습(supervised learning)에서 매우 큰 성공을 거둔 것에 비해 비지도 학습(unsupervised learning)에서는 상대적으로 잘 사용되지 못하였다. 그런 면에서 DCGAN 논문은 지도학습에서 CNN의 성공적인 모습과 비지도 학습에서의 격차를 줄이는 데에 큰 역할을 하였다고도 평가된다. 그러나 이렇게 추상적인 영향력을 굳이 말할 필요가 없을 정도로 생성한 이미지의 질부터 매우 인상적인 것을 볼 수 있다.
DCGAN 결과에서 가장 재미있는 부분은 아래와 같이 생성기의 입력으로 들어가는 $z$ 은닉 공간(latent space)에서 벡터 산술 연산이 가능하다는 점이다. 가장 흔한 예시로 word2vec 연구가 있다. 다음 수식을 계산하고 답을 추정해보자: $$KING~(왕) - MAN~(남자) + WOMAN~(여자)$$
사람은 생각보다 쉽게
$$QUEEN~(여왕)$$
이라는 단어를 연상할 수 있지만 컴퓨터에게 이런 연산은 사실
- 단어의 의미를 이해하고,
- 그에 맞는 새로운 단어를 찾는 등의
매우 고차원의 처리가 필요한 어려운 문제이다. 기존의 word2vec 연구에서는 뉴럴넷을 사용하여 말뭉치에서 실제로 단어 간의 관계를 학습하는 것을 보여주었고, DCGAN은 이런 문제를 말뭉치가 아닌 이미지에서 하는 것이 가능하다는 것을 보여주었다. 아래 그림이 바로 그 결과이다.

실제로 모두 DCGAN으로 생성된 결과들이다. 상당히 진짜 같은 결과만으로도 놀라운데, 이미지가 갖는 의미를 바탕으로 직관적인 벡터 산술이 된다는 것을 알 수 있다. 안경을 쓴 남자와 그냥 남자 그리고 일반 여자를 생성하게 하는 입력값들이 은닉 공간에 각각 벡터로 존재하고 있을텐데, 각각의 벡터를 서로 빼고 더해주면 최종적으로는 안경을 쓴 여자를 생성하는 입력 벡터를 찾을 수 있다는 것이다.
물론 생성기의 입력인 $z$ 벡터 하나만으로는 깔끔한 결과가 나오지 않기에 세 개 정도를 평균한 $\bar{z}$ 벡터를 사용해서 결과를 만든 것이기는 하지만 신기한 것은 매한가지다. 어떻게 보면 네트워크가 영상의 의미를 이해했다고 생각할 수 있다.
이 외에도 아래와 같이 침실을 생성한 결과 그림들을 보면 작은 그림이긴 하지만 꽤나 그럴듯한 결과를 만들어 냈다는 것을 확인할 수 있다.
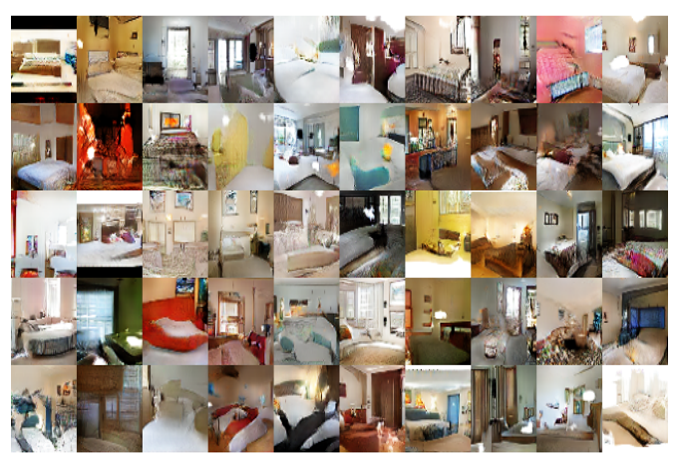
다섯 번 epoch을 돌려 학습한 후 생성된 침실 사진
뿐만 아니라 논문에서 "공간을 걷는다"라고 표현하였듯이 은닉 공간에서 천천히 벡터의 값을 바꿔가면, 생성기가 내보내는 이미지가 하나의 침실에서 다른 침실로 위화감 없이 부드럽게 변화하는 것을 볼 수 있다. 특히 벽이었던 부분이 자연스럽게 하나의 창으로 변화해가는 것을 보면 매우 놀랍다.

"은닉 공간에서 돌아다니기"
만약 생성기가 단순하게 영상을 외워서 보여줄 뿐이라면 주어진 특정 입력에 대해 특정 이미지를 내보내는 일대일 대응 함수를 학습한 것으로 생각할 수 있다. 이럴 경우 은닉 공간에서 굳이 부드러운 변화가 있을 이유가 없다. 바로 옆의 $z$ 벡터가 전혀 다른 샘플과 일대일로 연동될 수 있기 때문이다. 이렇듯 은닉 공간에서 벡터 연산이 가능하다는 것과 입력에 변화를 줬을 때 생성되는 결과가 부드럽게 변하는 것을 보는 등의 분석이 중요한 이유는 우리가 학습시킨 GAN의 생성기가 일대일 대응 함수와 같이 매우 단순한 의미없는 함수(mapping)를 학습한 것이 아니란 것을 시사하기 때문이다.
이렇게 수많은 이미지를 표현할 수 있는 정보들을 포괄할 수 있으면서도 부드러운 변화에 대응할 수 있는 함수를 학습할 수 있게 하기 위해서 은닉 공간을 잘 정하는 것도 매우 중요한 일이다. GAN에서는 보통 $z$ 은닉 공간은 고차원의 가우시안 분포를 많이 사용한다. 적절한 가정 하에서 충분히 복잡한 함수를 사용하여 대응시킬 수만 있다면 임의의 $d$ 차원 분포는 정규 분포를 따르는 $d$개의 변수로 나타낼 수 있다는 것이 알려져 있기 때문이다.
기존 생성 모델과 GAN의 차이점
그러면 GAN은 기존의 생성 모델들과 어떤 면이 다르기에 이렇게 비교적 또렷한 이미지를 만들 수 있는 것일까? GAN의 특징이자 가장 큰 차이점은 바로 GAN이 사실 샘플러(sampler)라는 것이다. 즉, 직접적으로 데이터의 분포를 학습하는 형태가 아니라 하나의 입력이 들어갔을 때 하나의 출력을 주는 형태의 독특한 특징을 지닌다.
조금 더 자세히 이해하기 위해 "확률 모델을 학습한다"는 것에 대해 생각해보면,
모델을 추정한다는 것은 일반적으로 우리가 알고 싶은 $\cal{P}$라는 진짜 데이터의 분포가 어딘가에 있을 때, 이로부터 얻은 샘플들이 i.i.d.하게 관측되었다고 가정한 후 $\cal{Q}$라는 모수 모델 클래스(parametric model class)를 만들어 그 안에서 $\cal{P}$와 가장 "가까운" 모델의 모수를 찾아내는 것을 말한다. 가장 간단한 예시로 데이터의 분포가 정규 분포를 따를 것이라 가정하여 가우시안 모델을 세우고 현재 내가 갖고 있는 데이터를 가장 잘 설명할 수 있는 평균과 분산 값을 찾는 과정을 생각해볼 수 있다.
이를 위해서는 $\cal{P}$와 $\cal{Q}$의 "차이" 혹은 "거리"를 계산할 수 있어야 한다. 그러면 구한 두 분포 사이의 거리를 줄여나가는 방향으로 모델의 모수들을 조정할 수 있고, 이 과정을 적합(fitting)이라고 한다. GAN도 Jensen-Shannon divergence라는 측도를 사용하여 분포 간의 거리를 계산하고 이를 최소화하는 방향으로 생성기를 학습한다고 분석할 수 있다.
보통 기존의 방식에서는 아래와 같은 $\cal{Q}$에 대한 가정들을 사용하는데:
- tractable sampling
- tractable parameter gradient with respect to sample
- tractable likelihood function
이 중 가장 강력한 가정이 바로 우도 함수(likelihood function)가 계산 가능하다(tractable)는 것이다. 많은 경우 현실의 모델은 계산이 불가능한 형태의 수식으로 나타나는 것을 상기한다면 기존의 모델들이 얼마나 강력한 가정을 사용하고 있는지 알 수 있다.
한편 GAN 형태의 모델들은 임의의 확률 변수 입력 값을 사용하여 비선형 변환 함수를 통과시키면 출력으로 샘플이 하나 튀어나오는 구조이다. 마치 버튼을 누르면 샘플이 튀어나오는 자판기처럼 생각할 수 있다. GAN 모델들의 독특한 점은 바로 이 부분에서 나온다. GAN 모델들은 다른 확률 모델들과는 달리 우도 함수를 근사하려하지 않고 샘플을 뽑아주는 함수를 학습했을뿐이기 때문에 우도 함수 모델링이 필요없는(likelihood-free) 모델이라고 할 수 있기 때문이다.
물론 이 부분은 GAN의 특징일뿐 장점일 수도 있고 단점이라 할 수도 있다. 데이터 분포에 대한 모델을 특정하지 않고 하나의 샘플을 뽑아서 보여주기 때문에 고정된 모델에 한계에 제약을 받지 않고 또렷한 이미지를 보여줄 수 있기도 하지만, 다른 한편으로는 정작 이미지를 잘 뽑더라도 데이터의 분포에 대한 정보를 직접적으로 얻기는 어렵기 때문에 분포를 알았을 때 시도해볼 수 있는 많은 분석들을 시도할 수가 없다는 아쉬움이 있다. 이 부분에 대해서는 Ian Goodfellow의 NIPS 2016 tutorial 논문[ref]이나 같은 워크샵에서 발표된 Sebastian Nowozin의 f-GAN [ref] 논문을 참고한다면 조금 더 심화된 내용을 확인할 수 있다.
이외에도 이후 연구된 WGAN에서는 기존의 GAN이 divergence를 측도로 사용하기 때문에 생기는 여러가지 문제를 지적하며 다른 방식의 측도를 제안하는 등, 점차 수식적인 분석과 함께 GAN의 가치 함수 자체를 근본적으로 수정하는 방향으로 연구가 발전되었다. 이를 바탕으로 보다 안정적인 학습과 결과를 보여주었는데 EBGAN LSGAN BEGAN 등 이후 나온 많은 GAN들이 WGAN의 카테고리로 분류할 수 있다.
이렇게 보면 모든 연구가 끝나서 더이상 할 것이 없는 것처럼 보이고 점차 이론적인 문제로 깊게 들어가면서 수학이 많이 들어가고 공학자들이 개입할 수 있는 여지가 없는 것 같지만 아직은 직관이 필요한 부분들이 많이 남아있으며 풀어야할 문제들도 많이 남아있다.
학습이 예전에 비해 수월해졌다는 것이지 정말 쉬워졌다는 것을 의미하진 않고 네트워크의 안정적으로 학습이 이미지의 질을 보장하지 않는 경우가 많으며 수렴은 여전히 어렵고 이어 소개할 mode collapse나 모델 평가 등 역시 아직도 풀어야 할 문제가 산적해 있다. 그런 의미에서 GAN 학습이 어려운 이유를 하나씩 소개하겠다.
GAN 학습이 어려운 이유 I: Convergence
지난 글에서 소개하였듯이 원 논문에서 GAN에 대한 이론적 근거를 증명해주었지만 아쉽게도 실제 구현은 이론적 배경이 되는 가정과 거리가 있다. 때문에 GAN 가치 함수를 뉴럴넷을 이용하여 풀었을 때 이상적인 전역해로 수렴한다는 보장이 되지 않는다. 게다가 풀어야하는 문제의 형태부터 이미 쉽게 문제를 풀 수 있는 볼록 함수 형태가 아닌 변수 두 개가 서로 엮여있는 안장점 문제(saddle point problem)를 고려해야하기 때문에 GAN은 학습이 매우 어렵기로 유명하다.
이 때문에 많은 사람들이 생각보다 간단한 예제에서도 문제를 풀기가 어려울 수 있는데 더 복잡한 문제에서 GAN 형태가 잘 풀릴 것인지에 대해 의문을 제기한 바 있다. 이 문제를 약간 더 직접적으로 느끼기 위해서 실제로 간단한 예제인 $V(x,y) = xy$가 어떻게 생겼는지 그려보면 다음과 같다.
f(x,y) = xy
이 문제는 $x=0, y=0$에서 안장점을 갖는 매우 대표적인 예시다. 그리고 $x$와 $y$에 대해 최소최대 문제를 풀면 이 안장점이 평형점이라는 것도 쉽게 알 수 있다. 사실 안장점이 모두 평형점이 되는 것은 아니지만 이 경우 하나의 변수에 대한 작은 변화가 다른 변수에 대해 가치 값을 줄일 수 없기 때문에 평형점이 되는 것이다. 만약 이 문제를 구배 감소법(gradient descent)으로 풀면 결과가 평형점 주변에서 수렴하지 못하고 최초 시작점에 따라서 반지름이 정해지는 궤도(orbit)를 영원히 움직이는 것을 확인할 수 있다. 심지어 학습율(learning rate)이 크면, 바깥 방향으로 발산하는 경우도 생길 수 있다.
이를 수식과 함께 확인해보면 좀 더 명확해진다. 학습율 $\gamma$를 고정하고 $n\in\mathbb{N}$일 때, 각 변수에 대해 구배 감소를 번갈아 계산하는 것은
$$\begin{align*} &x_{n+1} = x_n-\gamma y_n \\&y_{n+1}= y_n+\gamma x_n\end{align*}$$
와 같이 나타낼 수 있다. 이 때,
$$\left[ {\begin{array}{c}
x_{n+1} \\
y_{n+1} \\
\end{array} }\right] = \left[ {\begin{array}{cc}
1 & -\gamma \\
\gamma & 1 \\
\end{array} }\right] \left[{\begin{array}{c}
x_n \\
y_n \\
\end{array} }\right]$$
이므로 여기서 $$\left[{\begin{array}{cc}
1 & -\gamma \\
\gamma & 1 \\
\end{array} }\right] = \frac{1}{\alpha}\left[ {\begin{array}{cc}
\alpha & -\alpha\gamma \\
\alpha\gamma & \alpha \\
\end{array} }\right] = \frac{1}{\alpha}\left[{\begin{array}{cc}
\cos\theta & -\sin\theta \\
\sin\theta & \cos\theta \\
\end{array} }\right] $$
로 바꾸고 $\alpha = \sqrt{\frac{1}{1+\gamma^2}}\in(0,1), \theta = \cos^{-1}\alpha\in\left(0,\frac{\pi}{2}\right)$이라 해보겠다. 고등학교에서 회전 행렬에 대해 배운 사람이라면 위의 행렬식이 매우 익숙할 것이다. $\gamma\approx0$일 때, 즉 학습율이 충분히 작아서 $\alpha\approx 1$이면 구배 감소의 결과가 언제나 안정한 궤도(stable orbit)으로 빠지고, $\alpha<1$인 경우 $(x_n,y_n)$이 나선형으로 발산하게 된다.
GAN 학습이 어려운 이유 II: Mode Collapse
앞서 소개한 문제도 그렇지만 GAN 학습이 어려운 이유는 대부분 그 가치 함수의 형태에서 기인한다. 두 번째로 소개할 mode collapse 문제 역시도 GAN의 독특한 가치 함수와 그 문제 풀이 방식 때문에 생기는 것으로 해석할 수 있다.
Mode Collpase 예시 [ref]
위 그림이 전형적인 mode collapse 문제의 예시다. 맨 오른쪽의 목표 분포를 보시면 가우시안 혼합 모델로 총 여덟 개의 최빈값(mode)이 있는 것을 볼 수 있다. 아래 줄의 그림이 이 목표 분포를 근사하기 위해 GAN으로 여러번 반복하여 학습을 한 결과들을 보여준다.
GAN이 뽑은 샘플들을 보면 각각의 최빈값들을 각 단계마다 돌아가며 방문하는 것을 볼 수 있다. 즉, 원래라면 윗 줄과 같이 전체 최빈값들을 보고 목표 분포가 여덟 개의 최빈값을 갖는 분포라는 것을 찾아내야하지만, GAN은 그렇게 하지 못하는 모습을 보여준다. 좀 더 직접적인 예를 들자면 숫자가 1부터 8까지 섞여 있는 이미지들로 데이터 분포가 있을 때, 우리는 GAN이 1부터 8까지 모든 숫자들을 만들어낼 수 있기를 바라는데 실제로는 1과 같이 가장 쉬운 한 가지 숫자만 만드는 모델을 학습한다는 것이다. 이런 현상을 하나의 최빈값에만 함몰되는 모델이나 함수를 학습한다고 하여 mode collapse 문제라고 부른다.
사실 우리가 매 단계마다 최적의 구별자 $D^*$를 계산할 수 있다면야 이런 문제가 생기지 않겠지만 뉴럴넷으로 모델을 만들 경우 수렴이 될 때까지 계산을 매우 여러 번 해야하고 여러 가정이 깨지면서 수렴이 보장되지도 않는다. 따라서 현실적으로는 가치 함수를 각각의 변수에 대해 일정 횟수만큼 번갈아 푸는 방식을 택하는데 이런 방식 때문에 문제가 생기게 된다.
원래 풀고자하는 GAN의 가치 문제는 다음과 같은 최소최대 문제이다:
$$G^* = \min_G \max_D V(G,D).$$
그렇지만 실제 학습을 할 때는 $G$와 $D$에 대해 번갈아가며 풀어주기 때문에 뉴럴넷의 입장에서는 이러한 최소최대 문제와 아래 같은 최대최소 문제가 구별되지 않는다:
$$G^* = \max_D \min_G V(G,D).$$
문제는 최대최소 문제에서 생긴다. 수식의 안 쪽부터 살펴보면 $G$에 대한 최소 문제가 먼저 있기 때문에 생성자의 입장에서는 현재 고정되어있는 (비최적, non-optimal) 구별자가 가장 헷갈려 할 수 있는 샘플 하나만 학습하면 된다. 즉, 가치 함수를 가장 최소화할 수 있는 최빈값 하나만 내보내면 된다. 이렇듯 GAN의 가치 함수 자체와 엮여 있는 문제이기 때문에 mode collapse 문제는 아직도 GAN에서 완전히 해결되지 않고 있다.
GAN 학습이 어려운 이유 III: Evaluation
이에 더해 모든 생성 모델이 갖는 고질적인 문제가 파로 평가의 객관성이다. 생성을 한 이미지의 질을 평가할 수 있는 객관적인 기준을 정하는 것이 매우 어렵기 때문에 새로운 모델이 예전의 모델에 비해 발전한 것인지 평가하는 것이 쉽지 않고 연구의 방향을 잡기도 어렵다.
현재 사용되는 방식을 몇 가지 살펴보자면 대표적인 것이 아마존 매카니컬 터크(Amazon Mechanical Turk)를 사용하여 사람이 직접 평가하도록 하는 방식이다. 그러나 이런 방법은 매우 주관적이고, 일관된 평가가 어려우며, 위에서 설명한 mode collapse가 일어난 경우 전혀 모델의 문제점을 파악할 수 없다는 단점이 있다. Mode collapse가 일어난 모델의 경우 생성하는 이미지의 다양성이 부족할 뿐이지 단일 이미지의 자체는 상당히 질이 좋을 수 있기 때문이다.
두번째로는 Inception score라고 하여 구글의 인셉션 이미지 분류 모델에 생성된 이미지를 넣어 나오는 값을 바탕으로 평가를 하는 방식이 있다. 이 방법은 값이 일관되고 어느 정도 객관성을 보장할 수 있다는 장점이 있어 꽤 자주 사용되고 있다. 하지만 굳이 인셉션 모델을 사용해야하는 이유도 없고 어떤 모델의 경우 인셉션 모델에 특화(overfitting)되어 실제 이미지의 질과는 무관하게 점수가 좋게 나올 수도 있다는 문제를 안고 있다.
이렇게 앞서 소개한 문제들 외에도 다양한 연구거리가 남아있겠지만 세 가지로 크게 정리해보았다. GAN 연구가 활발하고 매일 하루가 멀다하고 쏟아지는만큼 더이상 연구할 것이 없고 너무 늦었다고 생각할 수 있으나 알고보면 아직 가야할 길이 멀다.
창GAN기-믿거나 말거나
마지막으로 GAN에 대한 탄생비화 [ref]를 소개해드리면서 글을 마무리하겠다. Ian Goodfellow가 최초로 만든 GAN은 multi-layer perceptron (MLP)을 이용한 매우 단순한 형태의 GAN이었다고 한다. 거짓말 같지만 단 한 번의 시도만에 바로 성공했다는데... 물론 매우 간단한 문제에 대해 적용해봤을 것으로 추측되지만 GAN이 수렴시키기 어렵기로 악명 높다는 것을 생각해보면 솔직히 믿기지 않는 일화이다 (마치 박혁거세 설화를 보는 느낌이랄까...).
Ian Goodfellow가 GAN에 대한 아이디어를 처음 떠올린 순간은 몬트리올의 ``The 3 Brewers''라는 펍에서 친구들과 얘기를 하던 중이었다고 한다. 박사를 마치고 연구실을 떠나는 친구를 송별하는 자리였는데, 그렇게 모인 친구들 중 한 명이 모든 사진의 통계적 정보를 넣어서 스스로 사진을 만들어 낼 수 있는 기계에 대해 얘기를 꺼냈고, 어떻게 하면 그런 기계를 현실적으로 만들 수 있을 지에 대해 논쟁이 벌어졌다.
존재하는 모든 사진에 대한 통계적인 정보를 얻는 것부터 일단 말이 되지 않으니 불가능한 프로젝트라고 생각하다가 순간 뉴럴넷을 사용해서 기계를 가르치면 더 진짜 같은 사진을 만들 수 있지 않을까 하는 생각이 들었다고 한다. 하지만 친구들은 그 아이디어에 대해 부정적이였고, 살짝 열이 받은 Ian은 새벽에 술자리에서 돌아오자마자 앉은 자리에서 노트북으로 GAN을 코딩했다고 한다. 그리고 거짓말 같이 단 번에 성공했다는데, 이후 인터뷰에서도 ``매우 매우 운이 좋았다. 만약 GAN이 한 번에 성공하지 않았다면, 그냥 포기했을 것이다'' 라며 스스로도 운이 좋았다고 하였다.
이 인터뷰 내용이 사실이라면 여기서 우리는 여러가지 교훈을 얻을 수 있다 (옛날 이야기에는 언제나 교훈이 있는 법). 문제를 설정하고 풀 때 직관력이 매우 중요하다는 것과 그 직관으로 얻은 아이디어를 바로 실험해보는 실행력이 중요하다는 것, 술자리에서 연구 얘기만 주구장창 하여도 진지하고 재미있게 들어줄 사람들이 있는 집단에 들어가야 한다는 것 그리고 마지막으로 되는 놈은 뭘 해도 된다고 운도 조금은 좋아야 한다는 것이다. 희망적인 것은 어떤 문제에 대한 직관력은 그 분야와 연관된 깊은 수학적 지식에서 나올 수도 있지만 수많은 시행착오(a.k.a. 삽질)을 바탕으로 한 경험으로 길러질 수도 있다는 점이다. 그리고 매우 다양하게 많은 시도를 하다보면 통계적으로 되는 방법을 찾을 확률이 높으니 운이라는 것도 어느 정도 통계에 기대볼 수 있을 것 같다. 이렇게 열정적으로 문제를 풀다보면 비슷한 사람들이 모여있는 집단(카카오..?)에 갈 수 있는 기회가 생기고, 더 재미있게 잘 연구를 할 수 있는 선순환이 이루어지지 않을까?
엄밀한 수학 지식을 바탕으로 차근차근 쌓아 올렸을 것 같은 매우 복잡한 이론들도 순간적인 직관에서 시작하는 경우가 매우 많은 것 같다. 그러니 수학이 어려운 공학자들이여 우리 모두 힘을 내자! 수학을 잘하는 수학자들과 실험을 바탕으로 감이 살아있는 공학자들이 각자가 잘하는 영역에서 연구를 하며 협업을 통해 문제를 발전시켜 나간다면 언젠가는 정말로 이미지뿐만 아니라 사람의 생각을 모사하는 궁극의 생성 모델을 만들 수 있지 않을까 기대해본다.
다음 읽을 거리
 Korean
Korean English
English